ماذا تفعل هذه الحاسبة
تقوم هذه الأداة بجمع أو طرح متجهين ثنائيي الأبعاد بدلالة مركّبتيهما على المحورين x وy، ثم تُرجع المتجه المحصّل. وتعرض مركّبتي المحصّلة (\(R_x\) و\(R_y\))، ومقدارها \(R\)، واتجاهها \(\theta\) مقيسًا بالدرجات في عكس اتجاه عقارب الساعة بدءًا من الاتجاه الموجب للمحور x. وهي أداة رياضية وفيزيائية عامة تصلح في كل مكان — فهي لا تفترض أي قوانين محلية أو نظام وحدات معيّن، شرط أن تكون مدخلاتك متجانسة الوحدات.
طريقة الاستخدام
أدخل مركّبتي x وy للمتجه A والمتجه B، واختر بين الجمع أو الطرح، ثم اقرأ المقدار والزاوية مباشرةً. وإذا كانت متجهاتك معطاة بصيغة المقدار والزاوية، فحوّلها أولًا إلى مركّبات باستخدام \(x = m\cdot\cos(\theta)\) و\(y = m\cdot\sin(\theta)\)، ثم أدخل القيم الناتجة هنا.
شرح المعادلة
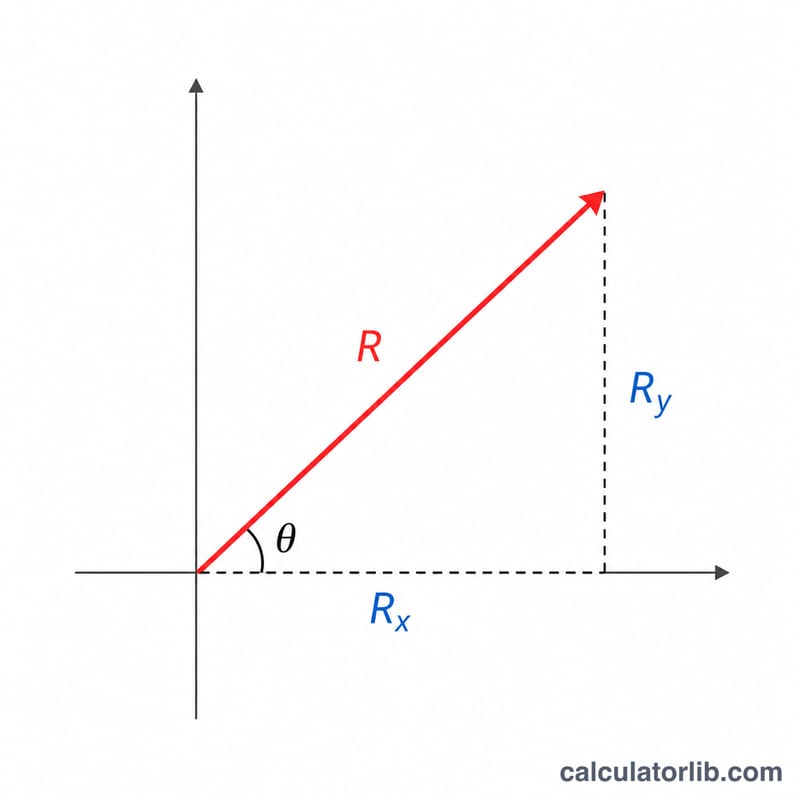
يتم جمع المتجهات مركّبةً بمركّبة: $$R_x = A_x \pm B_x, \quad R_y = A_y \pm B_y$$ (استخدم إشارة الطرح عند الطرح). أما المقدار فيُحسب من نظرية فيثاغورس: $$R = \sqrt{R_x^2 + R_y^2}$$ ويُحسب الاتجاه بدالة الظل العكسي ذات الوسيطين \(\theta = \operatorname{atan2}(R_y, R_x)\)، التي تضع الزاوية في الربع الصحيح — على خلاف دالة arctan العادية — وتُرجع قيمة بين −180° و+180°.
مثال محلول
لنجمع \(A = (3, 4)\) و\(B = (1, 2)\). عندئذٍ \(R_x = 3 + 1 = 4\) و\(R_y = 4 + 2 = 6\). ويكون المقدار $$\sqrt{4^2 + 6^2} = \sqrt{52} \approx 7.2111 \text{ وحدة}$$ أما الاتجاه فهو \(\operatorname{atan2}(6, 4) \approx 56.31°\) فوق الاتجاه الموجب للمحور x.
التعاريف والمسرد
- متجه المحصلة
- المتجه الواحد \(\vec{R}\) المساوي لمجموع (أو الفرق) بين متجهين. للجمع \(\vec{R} = \vec{A} + \vec{B}\)؛ للطرح \(\vec{R} = \vec{A} - \vec{B}\). ويمثل التأثير الكلي للمتجهات المدمجة.
- المركبة (x / y)
- إسقاط المتجه على المحاور x و y. \(R_x\) هو الجزء الأفقي و \(R_y\) هو الجزء الرأسي. تُضاف المركبات بشكل مستقل: \(R_x = A_x \pm B_x\)، \(R_y = A_y \pm B_y\). تحمل المركبات نفس الوحدة التعسفية لكن المتسقة مثل المتجهات الأصلية (m, N, m/s، إلخ).
- الحجم
- طول المتجه، \(|\vec{R}| = \sqrt{R_x^2 + R_y^2}\). دائماً غير سالب ويُعبّر عنه بالوحدة المشتركة للمتجهات.
- زاوية الاتجاه \(\theta\)
- الزاوية التي يصنعها المتجه مع المحور x الموجب، مقاسة بعكس اتجاه عقارب الساعة. تُبلّغ عادةً بالدرجات أو الراديان؛ الوحدة عرف توافقي وليست كمية فيزيائية.
- atan2 مقابل atan
- \(\operatorname{atan}(R_y/R_x)\) تعيد قيماً فقط في \((-90^\circ, 90^\circ)\) وتفقد معلومات الإشارة عندما تكون كلا المركبتين سالبة أو عندما \(R_x<0\). \(\operatorname{atan2}(R_y, R_x)\) تستخدم إشارات كلا المركبتين لترجع الزاوية الصحيحة في النطاق الكامل \((-180^\circ, 180^\circ]\)، مما يضع المتجه في الربع الصحيح له.
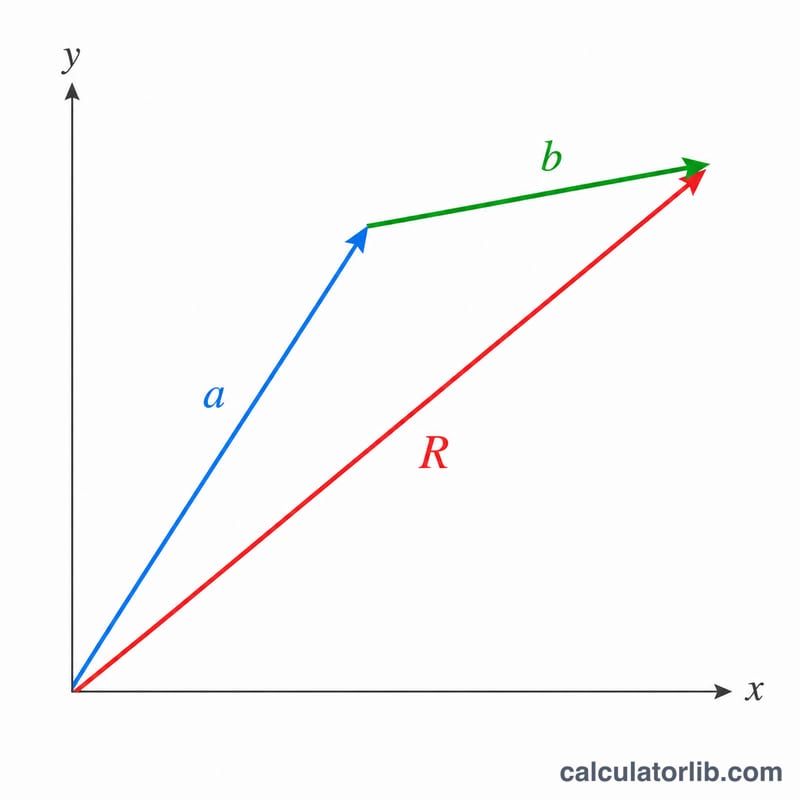
- جمع من الطرف إلى الذيل
- طريقة بيانية: ارسم \(\vec{A}\)، ثم ارسم \(\vec{B}\) بدءاً من طرف \(\vec{A}\). تمتد المحصلة من ذيل \(\vec{A}\) إلى طرف \(\vec{B}\). وهي المكافئ الهندسي لإضافة المركبات.
الأسئلة الشائعة
ماذا تعني الزاوية السالبة؟ تعني الزاوية السالبة \(\theta\) أن المحصّلة تشير إلى أسفل الاتجاه الموجب للمحور x (في اتجاه عقارب الساعة). أضِف 360° إذا كنت تفضّل التعبير عن الزوايا ضمن المجال من 0° إلى 360°.
هل يمكنني طرح المتجهات؟ نعم — اختر خيار الطرح لحساب A − B، وهو مكافئ لجمع A مع المتجه المعكوس للمتجه B.
ماذا لو كانت المحصّلة صفرًا؟ إذا كانت كلتا المركّبتين تساوي 0 فإن المقدار يساوي 0 ويكون الاتجاه غير معرّف؛ وفي هذه الحالة تعرض الحاسبة 0° اصطلاحًا.