Góc phương vị giữa hai điểm là gì?
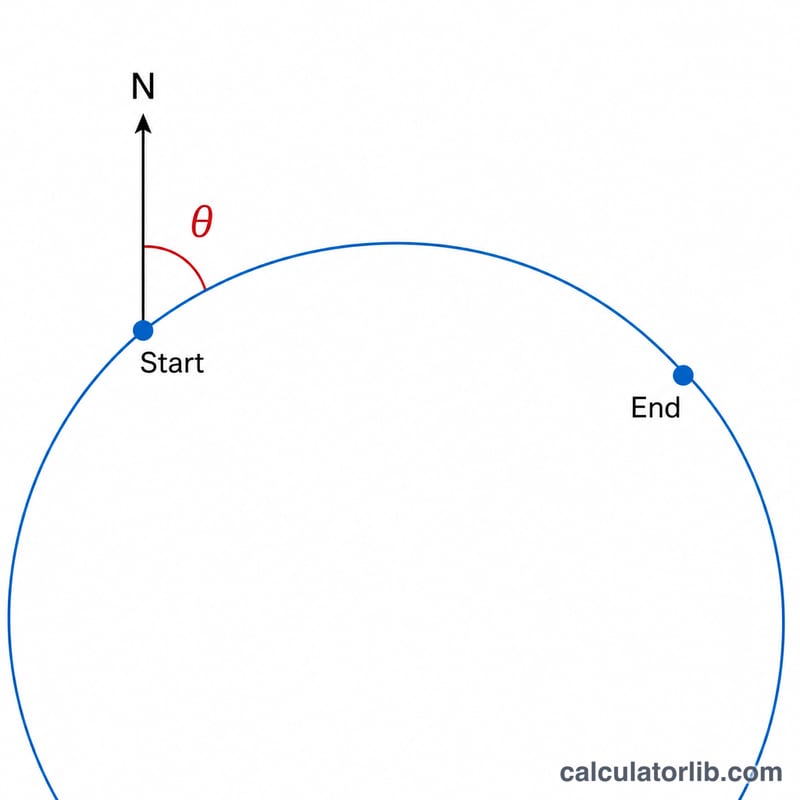
Góc phương vị (hay forward azimuth) giữa hai điểm địa lý là hướng la bàn mà bạn cần đi, được đo theo chiều kim đồng hồ tính từ hướng bắc thực, để di chuyển theo cung vòng tròn lớn ngắn nhất từ tọa độ xuất phát đến tọa độ đích. Góc này được biểu diễn bằng độ, từ 0° (chính bắc) qua 90° (đông), 180° (nam) đến 270° (tây). Công cụ này hoạt động ở mọi nơi trên Trái Đất khi bạn nhập vĩ độ và kinh độ ở dạng độ thập phân.
Cách sử dụng công cụ
Nhập vĩ độ và kinh độ của điểm xuất phát và điểm đích ở dạng độ thập phân. Dùng giá trị dương cho hướng bắc và đông, giá trị âm cho hướng nam và tây (ví dụ: 40.7128, -74.0060 cho thành phố New York). Nhấn tính toán để nhận góc phương vị ban đầu theo độ kèm hướng la bàn 16 phương gần nhất.
Giải thích công thức
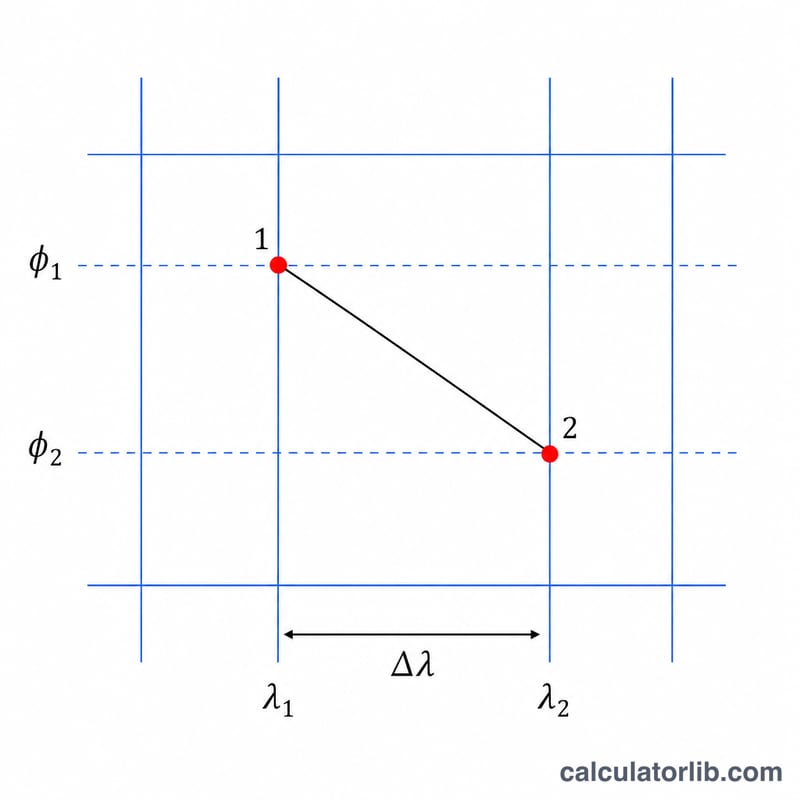
Góc phương vị ban đầu được tính bằng công thức lượng giác cầu
$$\theta = \operatorname{atan2}\left(\,\sin\Delta\lambda\cdot\cos\varphi_2,\; \cos\varphi_1\cdot\sin\varphi_2 - \sin\varphi_1\cdot\cos\varphi_2\cdot\cos\Delta\lambda\,\right) \bmod 360^{\circ}$$trong đó \(\varphi_1\) và \(\varphi_2\) là vĩ độ, còn \(\Delta\lambda\) là hiệu kinh độ, tất cả đều tính bằng radian. Hàm \(\operatorname{atan2}\) hai đối số cho ra góc chính xác ở mọi góc phần tư; sau đó ta đổi sang độ, cộng thêm 360 rồi lấy phần dư khi chia cho 360 để kết quả luôn nằm trong khoảng từ 0° đến 360°. Lưu ý đây là góc phương vị ban đầu — dọc theo lộ trình vòng tròn lớn, góc phương vị thay đổi liên tục, nên góc phương vị cuối cùng tại điểm đích sẽ khác.
Ví dụ minh họa
Từ Land's End (50.066389, -5.714722) đến John o' Groats (58.643889, -3.07): thay các giá trị vào công thức ta được góc phương vị ban đầu khoảng \(9{,}12^{\circ}\), làm tròn thành hướng la bàn là N (bắc). Hướng lệch nhẹ về phía đông so với chính bắc đúng với hình dạng kéo dài của nước Anh.
Bảng Tham Chiếu Các Điểm La Bàn
Một phương vị thường được biểu thị dưới dạng một giá trị từ \(0^{\circ}\) đến \(360^{\circ}\) được đo theo chiều kim đồng hồ từ phía bắc thật. Bông hướng 16 điểm chia vòng tròn đầy đủ thành các khu vực bằng nhau là \(360^{\circ} / 16 = 22.5^{\circ}\). Mỗi điểm được đặt tên tập trung vào một bội số của \(22.5^{\circ}\) và trải dài \(\pm 11.25^{\circ}\) xung quanh tâm đó.
| Điểm | Viết tắt | Phương Vị Trung Tâm | Phạm Vi Độ |
|---|---|---|---|
| Bắc | N | 0° | 348.75°–11.25° |
| Đông Bắc Bắc | NNE | 22.5° | 11.25°–33.75° |
| Đông Bắc | NE | 45° | 33.75°–56.25° |
| Đông Đông Bắc | ENE | 67.5° | 56.25°–78.75° |
| Đông | E | 90° | 78.75°–101.25° |
| Đông Đông Nam | ESE | 112.5° | 101.25°–123.75° |
| Đông Nam | SE | 135° | 123.75°–146.25° |
| Nam Nam Đông | SSE | 157.5° | 146.25°–168.75° |
| Nam | S | 180° | 168.75°–191.25° |
| Nam Nam Tây | SSW | 202.5° | 191.25°–213.75° |
| Tây Nam | SW | 225° | 213.75°–236.25° |
| Tây Tây Nam | WSW | 247.5° | 236.25°–258.75° |
| Tây | W | 270° | 258.75°–281.25° |
| Tây Tây Bắc | WNW | 292.5° | 281.25°–303.75° |
| Tây Bắc | NW | 315° | 303.75°–326.25° |
| Bắc Bắc Tây | NNW | 337.5° | 326.25°–348.75° |
Bắc nằm ở ranh giới \(0^{\circ}/360^{\circ}\), vì vậy phạm vi của nó bao quanh từ \(348.75^{\circ}\) qua \(0^{\circ}\) đến \(11.25^{\circ}\).
Cách Tính Phương Vị Bằng Tay
Ví dụ đã tính toán này tìm thấy phương vị vòng tròn lớn ban đầu từ Land's End, Anh (\(\varphi_1 = 50.07^{\circ}\,\text{N},\ \lambda_1 = -5.72^{\circ}\)) đến khu vực Lizard Point tại (\(\varphi_2 = 49.96^{\circ}\,\text{N},\ \lambda_2 = -5.20^{\circ}\)).
- Chuyển đổi các vĩ độ và kinh độ thành radian. Nhân mỗi giá trị độ với \(\pi/180\):
\(\varphi_1 = 50.07 \times \tfrac{\pi}{180} = 0.87388\ \text{rad}\), \(\varphi_2 = 49.96 \times \tfrac{\pi}{180} = 0.87196\ \text{rad}\), \(\lambda_1 = -5.72 \times \tfrac{\pi}{180} = -0.09984\ \text{rad}\), \(\lambda_2 = -5.20 \times \tfrac{\pi}{180} = -0.09076\ \text{rad}\). Bạn có thể xác nhận một chuyển đổi duy nhất như 0.87388 rad. - Tính chênh lệch kinh độ \(\Delta\lambda = \lambda_2 - \lambda_1\):
\(\Delta\lambda = -0.09076 - (-0.09984) = 0.00908\ \text{rad}\) (tương đương \(+0.52^{\circ}\)). - Tính tử số atan2 \(y = \sin(\Delta\lambda)\,\cos\varphi_2\):
\(y = \sin(0.00908)\times\cos(0.87196) = 0.00908 \times 0.64323 = 0.005840\). - Tính mẫu số atan2 \(x = \cos\varphi_1\sin\varphi_2 - \sin\varphi_1\cos\varphi_2\cos(\Delta\lambda)\):
\(x = (0.64154)(0.76568) - (0.76709)(0.64323)(0.99996)\)
\(x = 0.49121 - 0.49335 = -0.002143\). - Áp dụng atan2 để lấy góc tính bằng radian:
\(\theta = \operatorname{atan2}(0.005840,\ -0.002143) = 1.91898\ \text{rad}\). - Chuyển đổi radian thành độ bằng cách nhân với \(180/\pi\):
\(\theta = 1.91898 \times \tfrac{180}{\pi} = 109.95^{\circ}\). - Chuẩn hóa vào phạm vi \(0^{\circ}\)–\(360^{\circ}\) bằng \((\theta + 360)\bmod 360\):
\((109.95 + 360)\bmod 360 = 109.95^{\circ}\).
Phương vị ban đầu do đó là khoảng \(110^{\circ}\) — một hướng đông-nam đông (ESE). Bước chuẩn hóa rất quan trọng khi atan2 trả về một giá trị âm (chẳng hạn như một kết quả là \(-70^{\circ}\) trở thành \(290^{\circ}\)).
Câu hỏi thường gặp
Có giống như đường thẳng trên bản đồ phẳng không? Không. Đây là góc phương vị theo vòng tròn lớn (lộ trình ngắn nhất) trên mặt cầu, khác với đường rhumb có hướng cố định và khác với đường thẳng trên các phép chiếu bản đồ phẳng.
Góc phương vị có giữ nguyên trong suốt hành trình không? Không, với lộ trình vòng tròn lớn thì góc thay đổi dọc đường. Công cụ này báo cáo góc phương vị tại điểm xuất phát.
Nên dùng định dạng tọa độ nào? Độ thập phân. Hãy đổi từ độ-phút-giây trước, và dùng số âm cho vĩ độ nam và kinh độ tây.