什麼是兩點間的方位角?
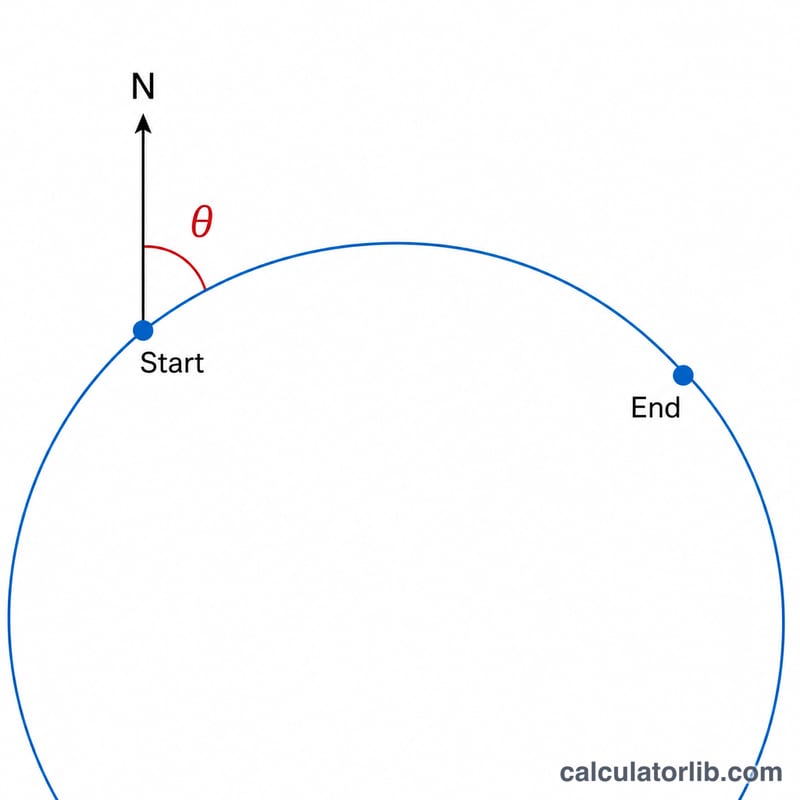
兩個地理位置之間的方位角(又稱前方位角,forward azimuth)指的是:沿著最短的大圓航線從起點前往目的地時,你應該朝哪個羅盤方向前進。它以真北為基準、依順時針方向量測,並以度為單位表示,範圍從 0°(正北)、90°(正東)、180°(正南)到 270°(正西)。本計算器以十進位度數的經緯度為輸入,可適用於地球上任何位置。
如何使用本計算器
請以十進位度數分別輸入起點與終點的緯度和經度。北緯與東經使用正值,南緯與西經則使用負值(例如紐約市為 40.7128, -74.0060)。按下計算後,即可取得以度為單位的初始方位角,以及最接近的 16 方位羅盤方向。
公式說明
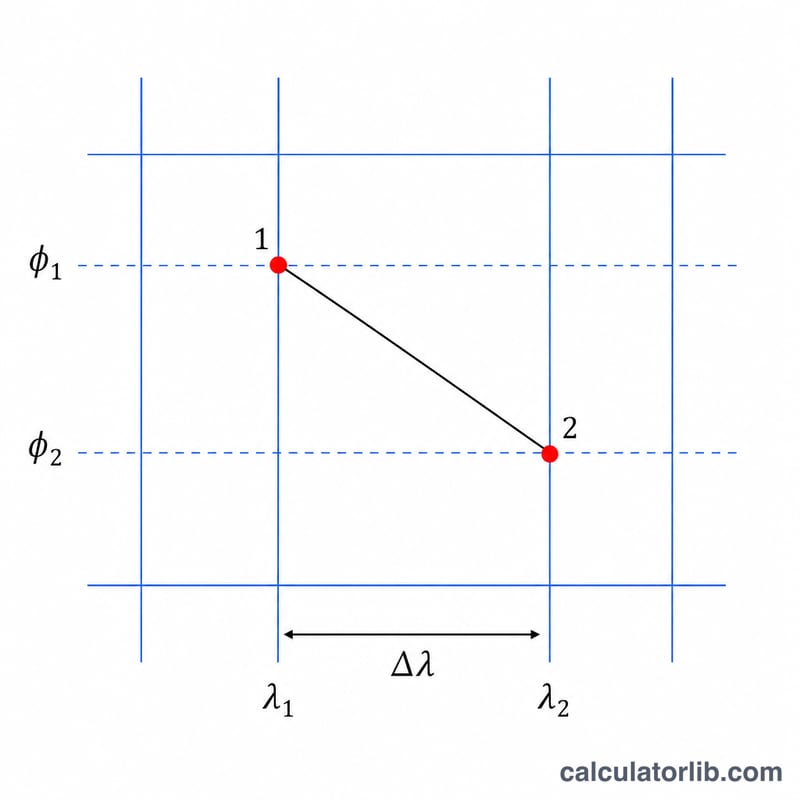
初始方位角採用球面三角公式計算:
$$\theta = \operatorname{atan2}\left(\,\sin\Delta\lambda\cdot\cos\varphi_2,\; \cos\varphi_1\cdot\sin\varphi_2 - \sin\varphi_1\cdot\cos\varphi_2\cdot\cos\Delta\lambda\,\right)$$其中 \(\varphi_1\) 與 \(\varphi_2\) 為兩點的緯度,\(\Delta\lambda\) 為經度差,全部以弧度表示。雙參數的 \(\operatorname{atan2}\) 函式能在所有象限回傳正確角度;接著我們將結果換算為度數、加上 360 後再對 360 取餘數,使數值永遠落在 0° 至 360° 之間。請注意,這是初始方位角——沿著大圓航線行進時方位角會持續改變,因此抵達終點時的最終方位角會與此不同。
實例演算
從蘭茲角(Land's End,50.066389, -5.714722)到約翰岬角(John o' Groats,58.643889, -3.07):將數值代入公式,可得初始方位角約為 \(9.12°\),四捨五入後對應的羅盤方向為 N(北)。這個略偏正北以東的方向,正好符合大不列顛島由南到北的地形走向。
羅盤方位參考表
方位角通常表示為從真北開始順時針測量的 \(0^{\circ}\) 到 \(360^{\circ}\) 之間的數值。16 點羅盤玫瑰圖將整個圓周分成相等的扇形,每個扇形為 \(360^{\circ} / 16 = 22.5^{\circ}\)。每個命名方位點位於 \(22.5^{\circ}\) 倍數的中心,並跨越該中心周圍的 \(\pm 11.25^{\circ}\) 範圍。
| 方位點 | 縮寫 | 中心方位角 | 度數範圍 |
|---|---|---|---|
| 北 | N | 0° | 348.75°–11.25° |
| 北偏北東 | NNE | 22.5° | 11.25°–33.75° |
| 北東 | NE | 45° | 33.75°–56.25° |
| 東偏北東 | ENE | 67.5° | 56.25°–78.75° |
| 東 | E | 90° | 78.75°–101.25° |
| 東偏南東 | ESE | 112.5° | 101.25°–123.75° |
| 南東 | SE | 135° | 123.75°–146.25° |
| 南偏南東 | SSE | 157.5° | 146.25°–168.75° |
| 南 | S | 180° | 168.75°–191.25° |
| 南偏南西 | SSW | 202.5° | 191.25°–213.75° |
| 南西 | SW | 225° | 213.75°–236.25° |
| 西偏南西 | WSW | 247.5° | 236.25°–258.75° |
| 西 | W | 270° | 258.75°–281.25° |
| 西偏北西 | WNW | 292.5° | 281.25°–303.75° |
| 北西 | NW | 315° | 303.75°–326.25° |
| 北偏北西 | NNW | 337.5° | 326.25°–348.75° |
北方跨越 \(0^{\circ}/360^{\circ}\) 邊界,因此其範圍從 \(348.75^{\circ}\) 經過 \(0^{\circ}\) 環繞至 \(11.25^{\circ}\)。
如何手工計算方位角
此工作示例求出從英國陸地盡頭 (\(\varphi_1 = 50.07^{\circ}\,\text{N},\ \lambda_1 = -5.72^{\circ}\)) 到蜥蜴角區域 (\(\varphi_2 = 49.96^{\circ}\,\text{N},\ \lambda_2 = -5.20^{\circ}\)) 的初始大圓方位角。
- 將緯度和經度轉換為弧度。將每個度數值乘以 \(\pi/180\):
\(\varphi_1 = 50.07 \times \tfrac{\pi}{180} = 0.87388\ \text{rad}\)、\(\varphi_2 = 49.96 \times \tfrac{\pi}{180} = 0.87196\ \text{rad}\)、\(\lambda_1 = -5.72 \times \tfrac{\pi}{180} = -0.09984\ \text{rad}\)、\(\lambda_2 = -5.20 \times \tfrac{\pi}{180} = -0.09076\ \text{rad}\)。您可以確認單次轉換,例如 0.87388 rad。 - 計算經度差 \(\Delta\lambda = \lambda_2 - \lambda_1\):
\(\Delta\lambda = -0.09076 - (-0.09984) = 0.00908\ \text{rad}\)(等同於 \(+0.52^{\circ}\))。 - 計算 atan2 分子 \(y = \sin(\Delta\lambda)\,\cos\varphi_2\):
\(y = \sin(0.00908)\times\cos(0.87196) = 0.00908 \times 0.64323 = 0.005840\)。 - 計算 atan2 分母 \(x = \cos\varphi_1\sin\varphi_2 - \sin\varphi_1\cos\varphi_2\cos(\Delta\lambda)\):
\(x = (0.64154)(0.76568) - (0.76709)(0.64323)(0.99996)\)
\(x = 0.49121 - 0.49335 = -0.002143\)。 - 應用 atan2 以獲得弧度角:
\(\theta = \operatorname{atan2}(0.005840,\ -0.002143) = 1.91898\ \text{rad}\)。 - 將弧度轉換為度數,乘以 \(180/\pi\):
\(\theta = 1.91898 \times \tfrac{180}{\pi} = 109.95^{\circ}\)。 - 規範化至 \(0^{\circ}\)–\(360^{\circ}\) 範圍,使用 \((\theta + 360)\bmod 360\):
\((109.95 + 360)\bmod 360 = 109.95^{\circ}\)。
初始方位角因此約為 \(110^{\circ}\)—一個東南偏東 (ESE) 航向。規範化步驟在 atan2 返回負值時很重要(例如,結果 \(-70^{\circ}\) 變為 \(290^{\circ}\))。
常見問題
這跟平面地圖上的直線一樣嗎?不一樣。本工具計算的是球面上的大圓(最短路徑)方位角,與固定航向的恆向線(rhumb line),以及平面投影上的直線都不相同。
方位角在整段旅程中會維持不變嗎?不會。大圓航線的方位角會沿途持續變化,本工具回報的是起點當下的方位角。
應該使用哪種座標格式?請使用十進位度數。若手上是度分秒格式,請先換算成十進位度數,並記得南緯與西經使用負值。