Công cụ này dùng để làm gì
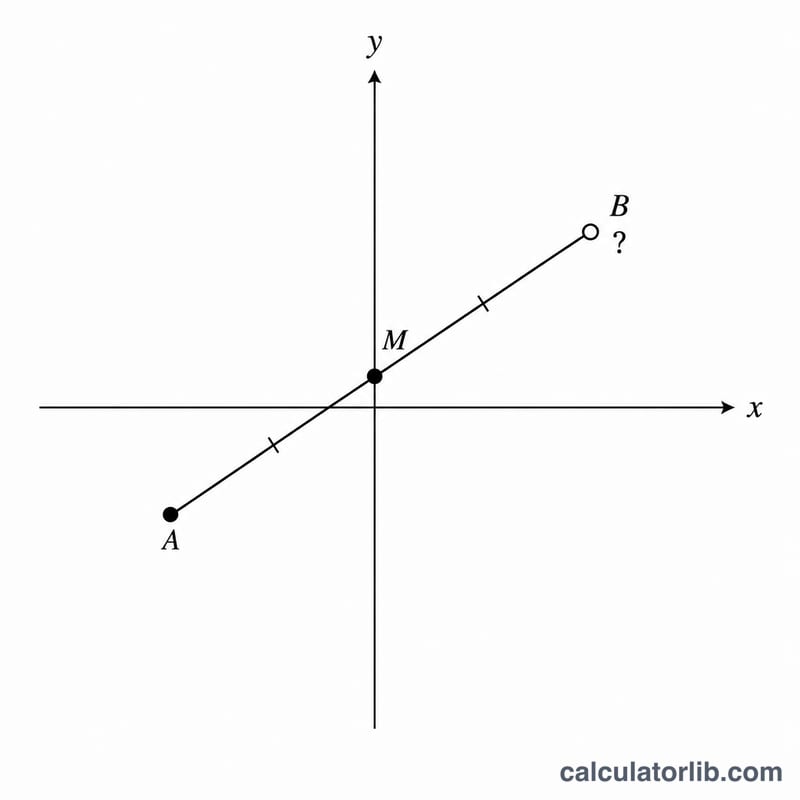
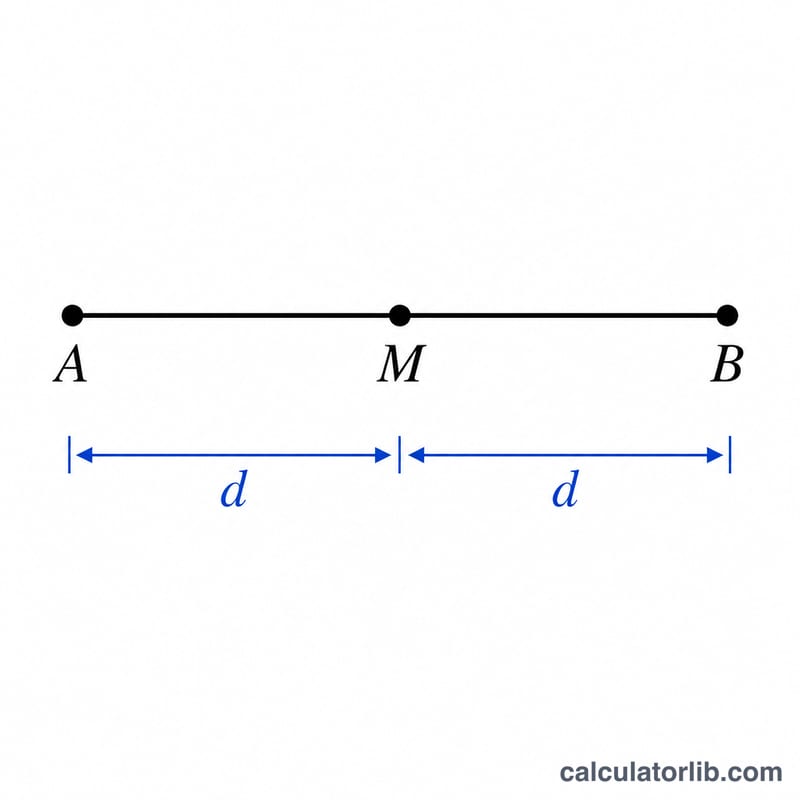
Công cụ này giúp bạn tìm điểm đầu mút chưa biết của một đoạn thẳng khi bạn đã biết một đầu mút và trung điểm. Trung điểm của đoạn thẳng là điểm nằm chính giữa hai đầu mút, vì vậy khi đã biết điểm giữa và một đầu, đầu còn lại được xác định hoàn toàn.
Giải thích công thức
Công thức trung điểm cơ bản cho biết trung điểm M của đoạn thẳng có hai đầu mút \((x_1, y_1)\) và \((x_2, y_2)\) chính là trung bình cộng các tọa độ: \(x_m = (x_1 + x_2) / 2\) và \(y_m = (y_1 + y_2) / 2\). Giải mỗi phương trình theo đầu mút chưa biết, ta được:
$$\left( x_2,\, y_2 \right) = \left( 2\,x_m - x_1,\ 2\,y_m - y_1 \right)$$Nói cách khác: nhân đôi mỗi tọa độ của trung điểm, rồi trừ đi tọa độ tương ứng của đầu mút đã biết.
Cách sử dụng
Nhập tọa độ của đầu mút đã biết \((x_1, y_1)\) và tọa độ của trung điểm \((x_m, y_m)\). Bạn có thể dùng số thập phân và số âm. Công cụ sẽ trả về đầu mút còn thiếu \((x_2, y_2)\).
Ví dụ minh họa
Giả sử một đầu mút là \((2, 3)\) và trung điểm là \((5, 7)\). Khi đó $$x_2 = 2\cdot 5 - 2 = 10 - 2 = 8$$ và $$y_2 = 2\cdot 7 - 3 = 14 - 3 = 11.$$ Vậy đầu mút còn thiếu là \((8, 11)\). Bạn có thể kiểm tra lại: trung điểm của \((2, 3)\) và \((8, 11)\) là \(((2+8)/2,\ (3+11)/2) = (5, 7)\), đúng như đề bài.
Câu hỏi thường gặp
Công cụ có dùng được với tọa độ âm không? Có. Công thức xử lý được cả số âm lẫn số thập phân mà không cần thay đổi gì.
Nếu đầu mút trùng với trung điểm thì sao? Khi đó đoạn thẳng có độ dài bằng 0 và hai đầu mút trùng nhau tại cùng một điểm.
Có dùng được trong không gian 3 chiều không? Phiên bản này xử lý điểm trong mặt phẳng 2 chiều; với không gian 3 chiều, bạn áp dụng quy tắc tương tự cho tọa độ z: \(z_2 = 2z_m - z_1\).