¿Qué es una calculadora de cuaterniones?
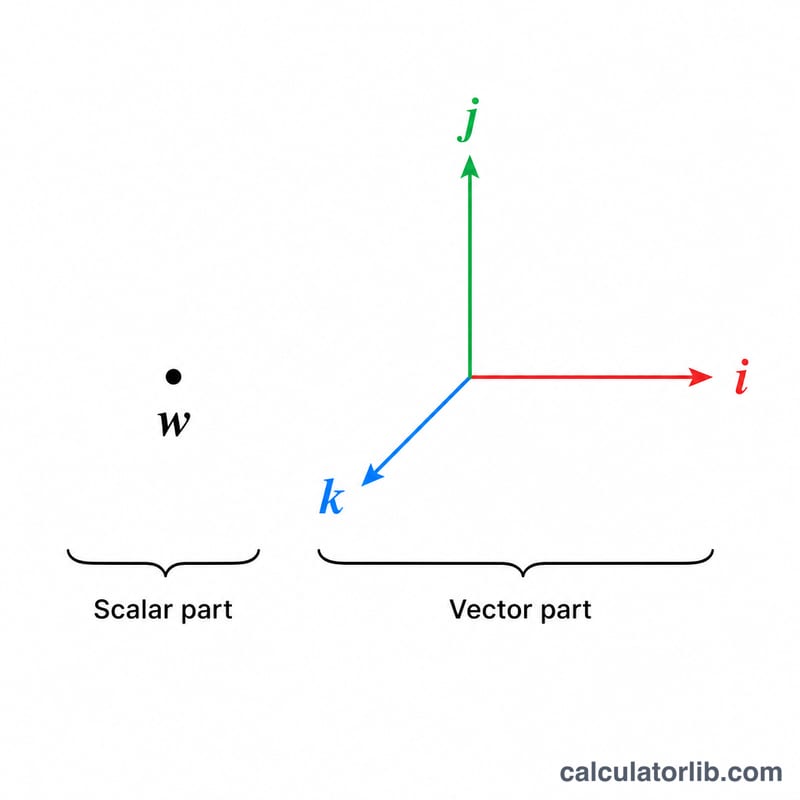
Un cuaternión es un número de cuatro dimensiones que se escribe como \(q = w + xi + yj + zk\), donde w es la parte escalar (real) y (x, y, z) es la parte vectorial (imaginaria). Los cuaterniones se emplean a diario en gráficos 3D por computadora, robótica, aeroespacial y física para representar rotaciones sin sufrir el bloqueo de cardán (gimbal lock) propio de los ángulos de Euler. Esta calculadora multiplica dos cuaterniones y, además, muestra la norma de cada uno y el conjugado del primero.
Cómo usarla
Introduce las cuatro componentes (w, x, y, z) de cada cuaternión, q1 y q2. La calculadora devuelve el producto de Hamilton q1 × q2 como un nuevo cuaternión, el módulo (norma) de ambos y el conjugado de q1. La multiplicación de cuaterniones no es conmutativa: en general q1 × q2 ≠ q2 × q1, así que el orden importa.
La fórmula explicada
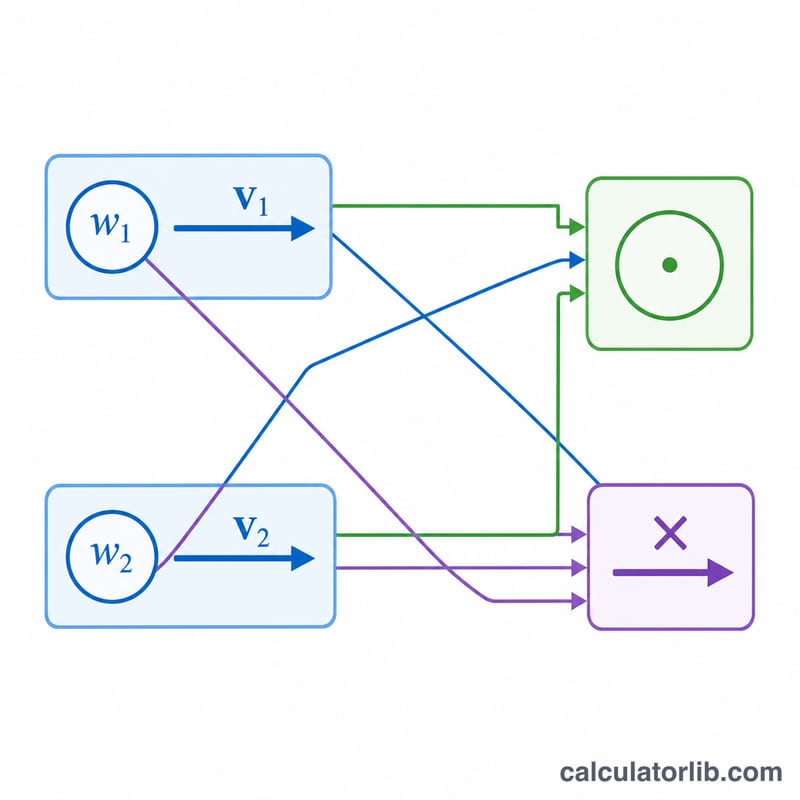
El producto de Hamilton combina una parte escalar y una parte vectorial. El resultado escalar es w₁w₂ menos el producto escalar de las partes vectoriales. El resultado vectorial es w₁v₂ + w₂v₁ más el producto vectorial v₁ × v₂. La norma es la longitud euclídea √(w²+x²+y²+z²), y el conjugado simplemente cambia el signo de las componentes vectoriales: q* = (w, −x, −y, −z).
$$\begin{gathered} q_1 q_2 = (w_1 w_2 - x_1 x_2 - y_1 y_2 - z_1 z_2) + (w_1 x_2 + x_1 w_2 + y_1 z_2 - z_1 y_2)\,i \\ + (w_1 y_2 - x_1 z_2 + y_1 w_2 + z_1 x_2)\,j + (w_1 z_2 + x_1 y_2 - y_1 x_2 + z_1 w_2)\,k \\[1.5em] \text{where}\quad \left\{ \begin{aligned} q_1 &= \text{w}_1 + \text{x}_1\,i + \text{y}_1\,j + \text{z}_1\,k \\ q_2 &= \text{w}_2 + \text{x}_2\,i + \text{y}_2\,j + \text{z}_2\,k \end{aligned} \right. \end{gathered}$$
$$q_1^{*} = \text{w}_1 - \text{x}_1\,i - \text{y}_1\,j - \text{z}_1\,k$$
$$\lVert q_1 \rVert = \sqrt{\text{w}_1^{2} + \text{x}_1^{2} + \text{y}_1^{2} + \text{z}_1^{2}}$$
$$\lVert q_2 \rVert = \sqrt{\text{w}_2^{2} + \text{x}_2^{2} + \text{y}_2^{2} + \text{z}_2^{2}}$$
Ejemplo resuelto
Tomemos q1 = (1, 2, 3, 4) y q2 = (5, 6, 7, 8). La parte escalar es \(1\cdot5 - 2\cdot6 - 3\cdot7 - 4\cdot8 = 5 - 12 - 21 - 32 = -60\). La parte i es \(1\cdot6 + 2\cdot5 + 3\cdot8 - 4\cdot7 = 6 + 10 + 24 - 28 = 12\). La parte j es \(1\cdot7 - 2\cdot8 + 3\cdot5 + 4\cdot6 = 7 - 16 + 15 + 24 = 30\). La parte k es \(1\cdot8 + 2\cdot7 - 3\cdot6 + 4\cdot5 = 8 + 14 - 18 + 20 = 24\). Por tanto, \(q_1 \times q_2 = (-60, 12, 30, 24)\).
Preguntas frecuentes
¿Es conmutativa la multiplicación de cuaterniones? No. Debido al término del producto vectorial, q1 × q2 suele ser distinto de q2 × q1.
¿Qué es un cuaternión unitario? Un cuaternión cuya norma es igual a 1. Los cuaterniones unitarios representan rotaciones puras en el espacio 3D.
¿Cómo roto un vector? Trata el vector como un cuaternión con w = 0 y calcula q · v · q*, donde q es un cuaternión unitario que codifica la rotación.