क्वाटर्नियन कैलकुलेटर क्या है?
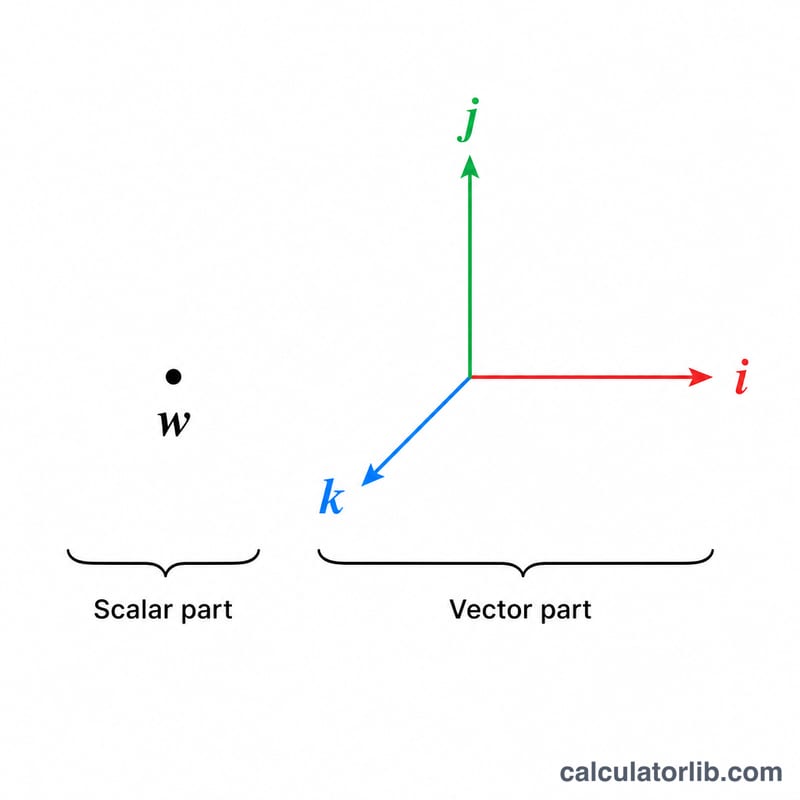
क्वाटर्नियन एक चार-विमीय संख्या है जिसे \(q = w + xi + yj + zk\) के रूप में लिखा जाता है, जहाँ w अदिश (वास्तविक) भाग है और (x, y, z) सदिश (काल्पनिक) भाग है। क्वाटर्नियन का व्यापक उपयोग 3D कंप्यूटर ग्राफ़िक्स, रोबोटिक्स, अंतरिक्ष-विज्ञान और भौतिकी में घूर्णन (rotation) दर्शाने के लिए होता है, क्योंकि ये ऑयलर कोणों (Euler angles) वाली गिम्बल-लॉक की समस्या से बचाते हैं। यह कैलकुलेटर दो क्वाटर्नियनों को गुणा करता है, और साथ ही दोनों इनपुट का नॉर्म तथा पहले का संयुग्म भी बताता है।
इसका उपयोग कैसे करें
प्रत्येक क्वाटर्नियन q1 और q2 के लिए चारों घटक (w, x, y, z) दर्ज करें। कैलकुलेटर एक नए क्वाटर्नियन के रूप में हैमिल्टन गुणनफल q1 × q2, दोनों इनपुट का परिमाण (नॉर्म), और q1 का संयुग्म लौटाता है। ध्यान रखें कि क्वाटर्नियन गुणन क्रमविनिमेय (commutative) नहीं होता: सामान्यतः q1 × q2 ≠ q2 × q1, इसलिए क्रम मायने रखता है।
सूत्र की व्याख्या
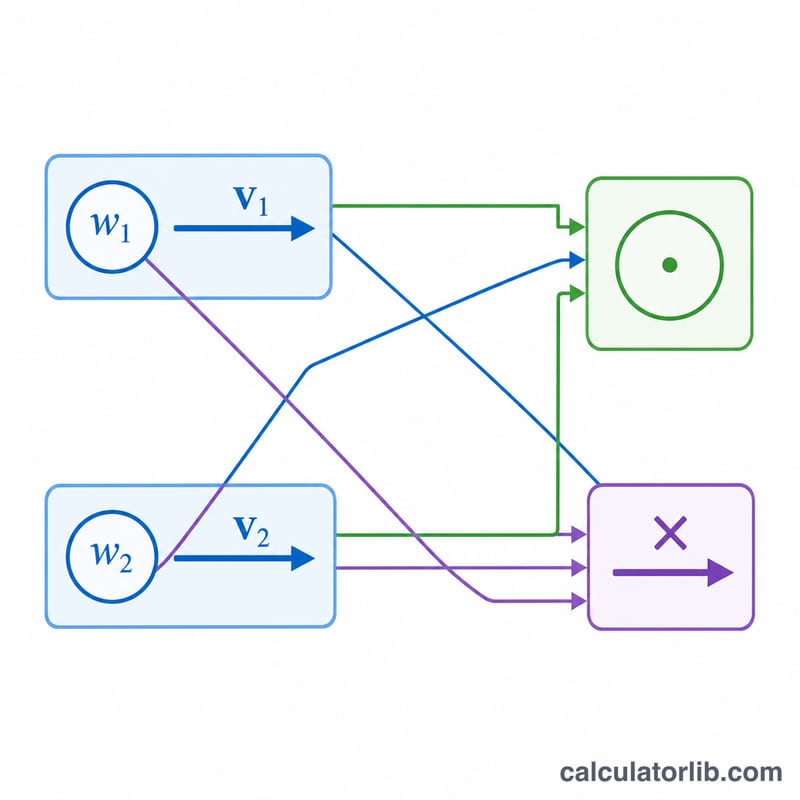
हैमिल्टन गुणनफल अदिश भाग और सदिश भाग को मिलाकर बनता है। अदिश परिणाम होता है w₁w₂ में से सदिश भागों के डॉट गुणनफल (dot product) को घटाना। सदिश परिणाम होता है w₁v₂ + w₂v₁ में सदिशों का क्रॉस गुणनफल v₁ × v₂ जोड़ना। नॉर्म यूक्लिडीय लंबाई \(\sqrt{w^{2}+x^{2}+y^{2}+z^{2}}\) है, और संयुग्म केवल सदिश घटकों का चिह्न बदल देता है: q* = (w, −x, −y, −z)।
$$\begin{gathered} q_1 q_2 = (w_1 w_2 - x_1 x_2 - y_1 y_2 - z_1 z_2) + (w_1 x_2 + x_1 w_2 + y_1 z_2 - z_1 y_2)\,i \\ + (w_1 y_2 - x_1 z_2 + y_1 w_2 + z_1 x_2)\,j + (w_1 z_2 + x_1 y_2 - y_1 x_2 + z_1 w_2)\,k \\[1.5em] \text{where}\quad \left\{ \begin{aligned} q_1 &= \text{w}_1 + \text{x}_1\,i + \text{y}_1\,j + \text{z}_1\,k \\ q_2 &= \text{w}_2 + \text{x}_2\,i + \text{y}_2\,j + \text{z}_2\,k \end{aligned} \right. \end{gathered}$$
$$q_1^{*} = \text{w}_1 - \text{x}_1\,i - \text{y}_1\,j - \text{z}_1\,k$$
$$\lVert q_1 \rVert = \sqrt{\text{w}_1^{2} + \text{x}_1^{2} + \text{y}_1^{2} + \text{z}_1^{2}}$$
$$\lVert q_2 \rVert = \sqrt{\text{w}_2^{2} + \text{x}_2^{2} + \text{y}_2^{2} + \text{z}_2^{2}}$$
हल किया हुआ उदाहरण
मान लें q1 = (1, 2, 3, 4) और q2 = (5, 6, 7, 8)। अदिश भाग है \(1\cdot5 - 2\cdot6 - 3\cdot7 - 4\cdot8 = 5 - 12 - 21 - 32 = -60\)। i भाग है \(1\cdot6 + 2\cdot5 + 3\cdot8 - 4\cdot7 = 6 + 10 + 24 - 28 = 12\)। j भाग है \(1\cdot7 - 2\cdot8 + 3\cdot5 + 4\cdot6 = 7 - 16 + 15 + 24 = 30\)। k भाग है \(1\cdot8 + 2\cdot7 - 3\cdot6 + 4\cdot5 = 8 + 14 - 18 + 20 = 24\)। अतः q1 × q2 = (−60, 12, 30, 24)।
अक्सर पूछे जाने वाले प्रश्न
क्या क्वाटर्नियन गुणन क्रमविनिमेय होता है? नहीं। क्रॉस-प्रोडक्ट पद के कारण q1 × q2 सामान्यतः q2 × q1 से भिन्न होता है।
यूनिट क्वाटर्नियन क्या है? ऐसा क्वाटर्नियन जिसका नॉर्म 1 के बराबर हो। यूनिट क्वाटर्नियन 3D स्थान में शुद्ध घूर्णन को दर्शाते हैं।
मैं किसी सदिश को कैसे घुमाऊँ? सदिश को w = 0 वाले क्वाटर्नियन के रूप में लें और q · v · q* की गणना करें, जहाँ q घूर्णन को दर्शाने वाला यूनिट क्वाटर्नियन है।