What the Servo Torque Calculator Does
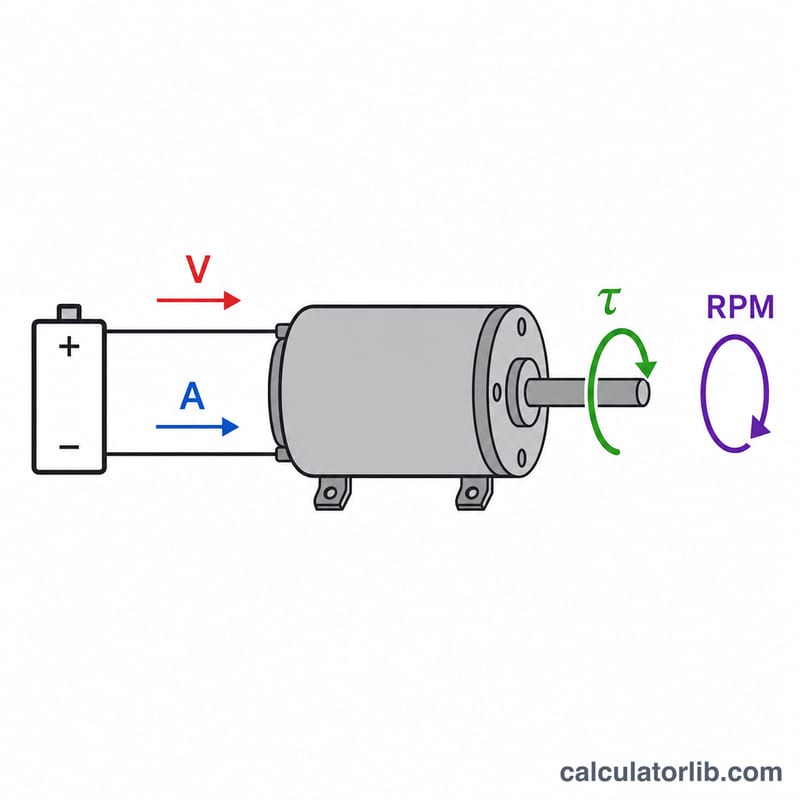
This calculator estimates the mechanical torque a servo motor can produce from three easy-to-find electrical and speed figures: operating voltage, operating current, and rotational speed in RPM. Instead of digging through datasheet torque curves, you get a quick torque estimate that is useful for rough motor sizing, comparing servos, or sanity-checking a design before you buy hardware.
The result is reported in newton-metres (N·m), and the tool also converts that to newton-millimetres (N·mm) — a unit commonly quoted on small hobby and robotics servos.
The Inputs You Provide
- Operating Voltage (V): the voltage supplied to the servo while it is working.
- Operating Current (A): the current the servo draws at that operating point.
- Speed (RPM): the rotational speed of the output shaft in revolutions per minute.
The Formula Explained
First the calculator works out electrical power, then converts that power and speed into torque:
- Power (W) = Voltage × Current
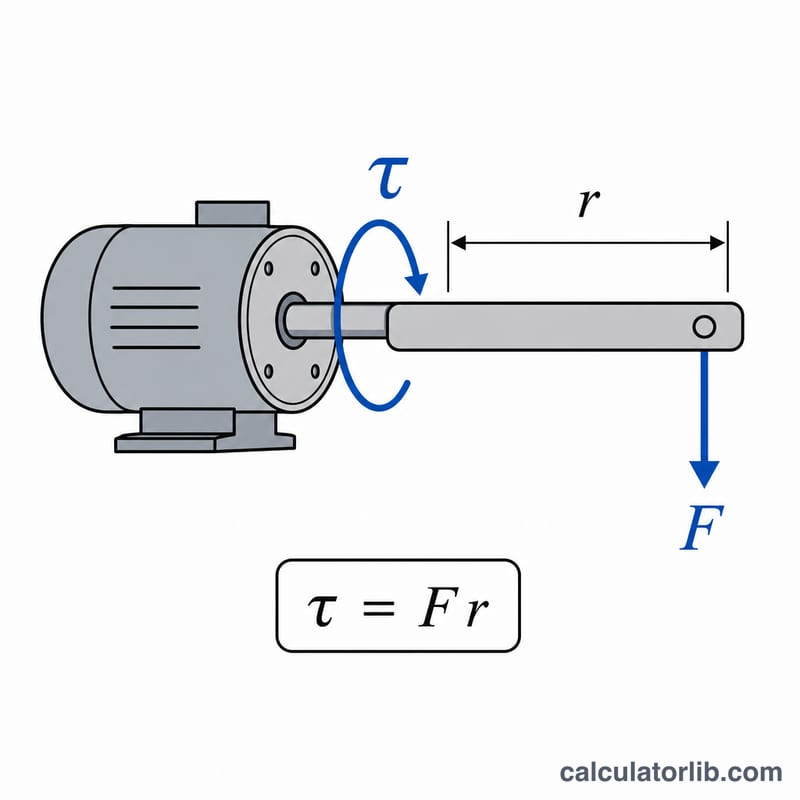
- Torque (N·m) = (Power × 9.549) ÷ Speed
The constant 9.549 comes from 60 ÷ (2π) and converts between RPM and radians per second, since power equals torque times angular velocity. The tool then multiplies the torque by 1000 to give a force/torque figure in N·mm.
Note this is an idealised estimate that assumes electrical power equals mechanical output — real servos lose energy to heat, friction, and gearing, so actual torque will be somewhat lower.
Worked Example
Suppose a servo runs at 6 V, draws 1.5 A, and turns at 60 RPM:
- Power = 6 × 1.5 = 9 W
- Torque = (9 × 9.549) ÷ 60 = 85.94 ÷ 60 ≈ 1.43 N·m
- In N·mm: 1.43 × 1000 ≈ 1432 N·mm
So this servo produces roughly 1.43 N·m of torque at that operating point.
Frequently Asked Questions
Why does higher RPM lower the torque? For a fixed power, torque and speed trade off against each other. Spreading the same power over more revolutions per minute leaves less torque available at the shaft.
Is this the real torque my servo will deliver? No — it is an upper-bound estimate assuming 100% efficiency. Use the input current at the load you care about (such as stall or rated current) and expect real torque to be lower due to losses.
How do I convert the result to kg·cm? Multiply N·m by about 10.2 to get kg·cm, a unit many hobby servos use (for example, 1.43 N·m ≈ 14.6 kg·cm).