ド・モアブルの定理とは?
ド・モアブルの定理は、複素数を任意のべき乗するためのスマートな方法を与えてくれます。二項式を何度も掛け合わせる代わりに、複素数を極形式で表し——絶対値 \(r\) と偏角 \(\theta\) を使って——\(r\) を \(n\) 乗し、角度を \(n\) 倍するだけで答えが求まります。この計算ツールでは、極形式への変換から計算までを自動で行い、結果を極形式と直交形式(\(a + bi\))の両方で表示します。
この計算ツールの使い方
複素数 \(z = a + bi\) の実部 \(a\) と虚部 \(b\) を入力し、続いて指数 \(n\) を入力します。ツールが極形式を求め、ド・モアブルの定理を適用して、計算後の実部・虚部・絶対値・偏角を出力します。指数 \(n\) には任意の実数を指定でき、累乗根を求めたい場合は分数、逆数のべき乗を求めたい場合は負の数も使えます。
計算式の解説
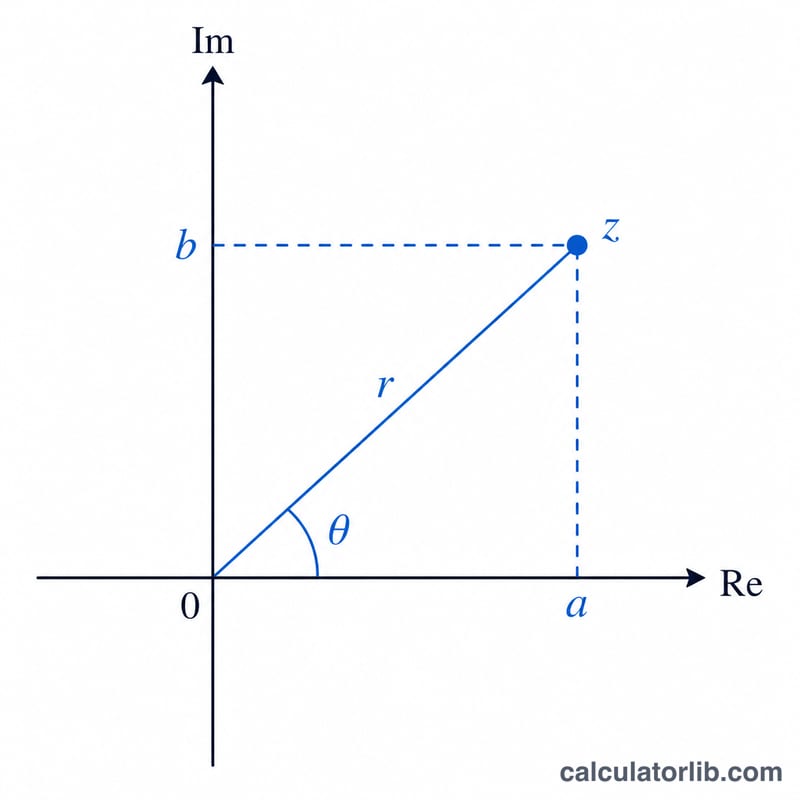
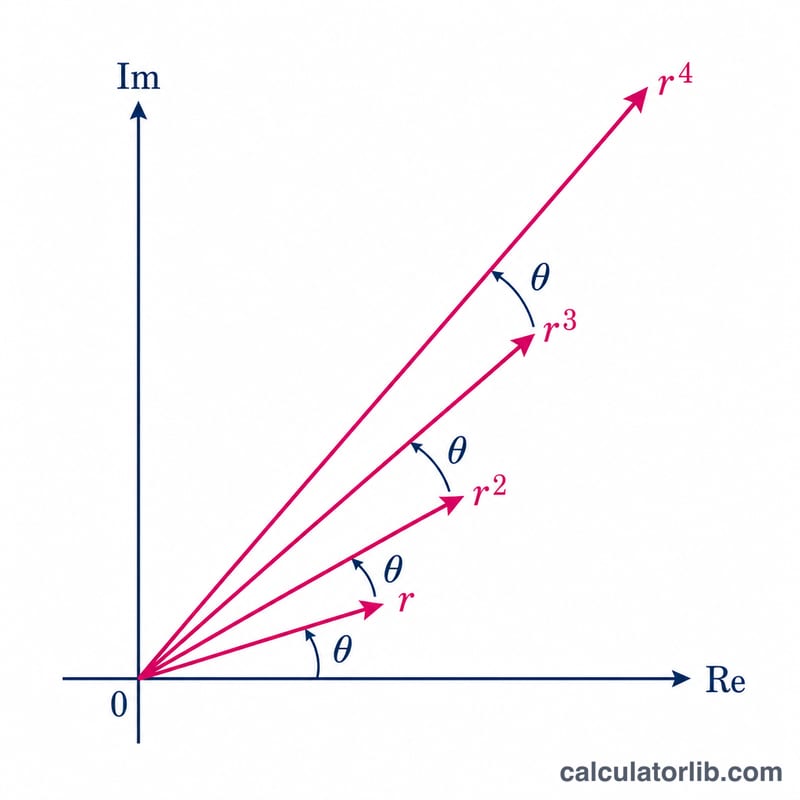
まず極形式に変換します。\(r = \sqrt{a^{2} + b^{2}}\) は原点からの距離、\(\theta = \operatorname{atan2}(b, a)\) は角度です。ここでド・モアブルの定理により、 $$\left(r(\cos\theta + i\sin\theta)\right)^{n} = r^{n}(\cos n\theta + i\sin n\theta)$$ が成り立ちます。新しい絶対値は \(r^{n}\)、新しい偏角は \(n\theta\) となります。これを直交形式に戻すと \(r^{n}\cdot\cos(n\theta) + i\cdot r^{n}\cdot\sin(n\theta)\) が得られます。
計算例
\(z = 1 + i\)、\(n = 2\) の場合を考えます。ここで \(r = \sqrt{1^{2} + 1^{2}} = \sqrt{2}\)、\(\theta = 45^\circ\) です。ド・モアブルの定理により、絶対値は \((\sqrt{2})^{2} = 2\)、偏角は \(2 \times 45^\circ = 90^\circ\) になります。したがって $$z^{2} = 2(\cos 90^\circ + i\sin 90^\circ) = 0 + 2i$$ です。直接計算でも確認できます:\((1 + i)^{2} = 1 + 2i + i^{2} = 2i\)。✓
よくある質問
\(n\) は負の数や分数でもよいですか? はい。\(n\) が負の場合は逆数のべき乗、\(n\) が分数の場合は累乗根のひとつ(主偏角に対応する主値)が得られます。
なぜ arctan ではなく atan2 を使うのですか? \(\operatorname{atan2}(b, a)\) は角度を正しい象限で返します。一方、単純な \(\arctan(b/a)\) では符号の情報が失われ、\(a = 0\) のときに計算できなくなります。
\(z = 0\) の場合はどうなりますか? 絶対値は 0 なので、正の \(n\) に対して \(0^{n} = 0\) となります。偏角は本来は定義されませんが、このツールでは 0 として扱います。