이 도구가 하는 일
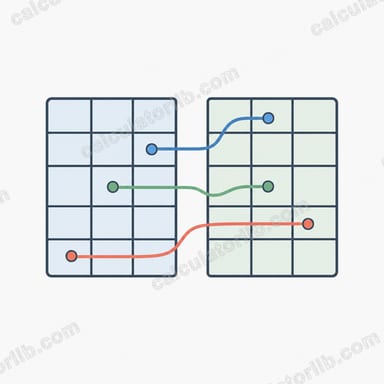
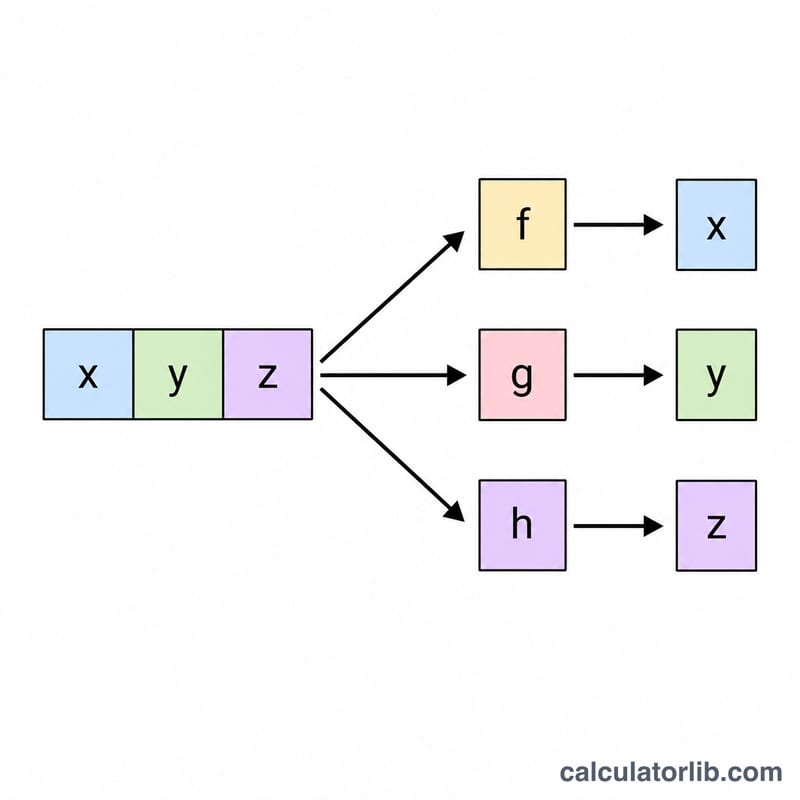
표 기반 3함수 계산기는 한마디로 '스프레드시트의 수식 열' 같은 도구입니다. 세 개의 열(각각 변수 \(x\), \(y\), \(z\)로 해석됩니다)에 숫자 표를 입력한 뒤, 최대 세 개의 수식 \(\text{f}(x,y,z)\), \(\text{g}(x,y,z)\), \(\text{h}(x,y,z)\)를 적어 넣으면 됩니다. 그러면 표의 모든 행을 차례로 훑으면서 해당 행의 \(x\), \(y\), \(z\) 값을 각 수식에 대입하고, 입력 행 하나당 결과 행 하나를 만들어 결과 표로 보여 줍니다. 단위나 지역, 국가별 규칙이 전혀 없는 순수 수학 계산 도구입니다.
$$\begin{gathered} f_i = \text{f}(x,y,z), \quad g_i = \text{g}(x,y,z), \quad h_i = \text{h}(x,y,z) \\[1.5em] \text{where}\quad \left\{ \begin{aligned} (x_i,\,y_i,\,z_i) &= \text{row } i \text{ of } \text{Data Table} \\ \text{shown to } &\ \text{Display} \text{ significant figures} \end{aligned} \right. \end{gathered}$$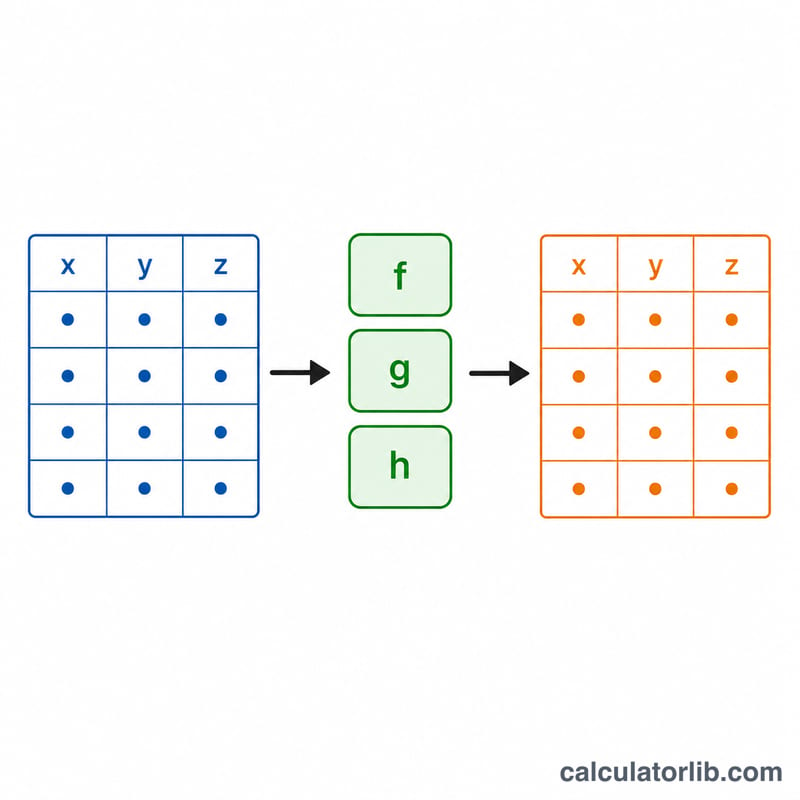
사용 방법
데이터 표에는 한 줄에 한 행씩 입력하고, 세 값은 쉼표나 공백, 탭으로 구분합니다. f, g, h 수식 칸은 원하는 만큼만 채우면 됩니다. 비워 둔 칸은 해당 결과 열만 빠질 뿐이므로, 함수 한 개·두 개·세 개 무엇으로도 자유롭게 쓸 수 있습니다. 표시할 유효숫자 자릿수를 고른 다음 실행하세요. 삼각함수는 라디안 단위로 계산하므로, 도(degree)로 바꾸려면 \(180/\pi\)를 곱해 주면 됩니다(기본 g, h 수식이 바로 이렇게 처리합니다).
지원하는 문법
연산자: + - * / ^ (거듭제곱), 단항 마이너스, 괄호. 상수: pi, e. 변수: \(x\), \(y\), \(z\). 함수: sqrt, cbrt, exp, log/ln(자연로그), log10, abs, sign, floor, ceil, round, sin, cos, tan, asin, acos, atan, atan2(y,x), sinh, cosh, tanh, pow(a,b), mod(a,b), min(a,b), max(a,b), hypot(a,b).
실제 계산 예시
기본 수식 \(f=\sqrt{x^2+y^2+z^2}\), \(g=\arctan(y/x)\cdot 180/\pi\), \(h=\arctan\left(\sqrt{x^2+y^2}/z\right)\cdot 180/\pi\)를 그대로 쓰면, \((3, 4, 0)\) 행은 \(f=5\), \(g=53.13010235\)도, \(h=90\)도가 됩니다. \((1, 1, 1)\) 행은 \(f=1.7320508\)(3의 제곱근), \(g=45\)도, \(h=54.7356103\)도입니다. 이 값들은 직교좌표 점을 구면좌표로 나타냈을 때의 반지름과 두 각도에 해당합니다.
자주 묻는 질문
각도는 도(degree)인가요, 라디안인가요? 모든 삼각함수는 라디안을 사용합니다. 라디안 결과에 \(180/\pi\)를 곱하면 도 단위로 표시할 수 있습니다.
0으로 나누거나 음수에 로그를 취하면 어떻게 되나요? 오류로 멈추지 않고 해당 칸에 "NaN" 또는 "Infinity"가 표시됩니다. IEEE 배정밀도(double) 규칙을 그대로 따릅니다.
유효숫자 설정이 계산 결과를 바꾸나요? 아닙니다. 보이는 자릿수만 조절할 뿐, 계산은 언제나 배정밀도(유효숫자 약 15~16자리)로 진행됩니다.